
A few months ago I was tipped off about an exciting beta release of a developer-friendly robot base called the Hackerbot. It's essentially a high-quality robo-vacuum base with some built-in sensors and a variable amount of additional hardware ( see the product lineup ) that serves as a platform for imagination. The Hackerbot community has been a fun and welcoming group where it is easy to get support, inspiration, and to share ideas.
The exciting news today is that the Hackerbot is now available to anyone!
Now selling
There’s a range of configurations and price points, depending on how much hardware you want to jump in with. I went with the "AI" version — it includes a Raspberry Pi 5, camera, microphone, speaker, and time-of-flight sensors. I haven’t added the head or arm (yet?)
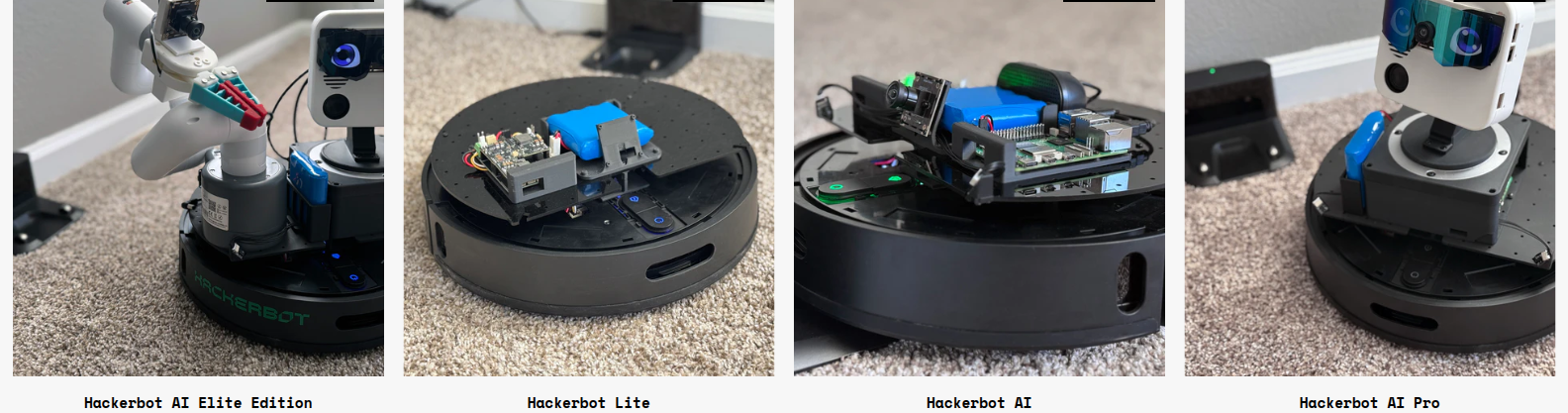
The head and arm both provide great starting points - if those are domains you're curious about exploring. For the time being I have simpler goals.
What's in the box?
The base includes a lidar unit along with bump and cliff sensors, and it supports SLAM-based mapping. Communication with the base's serial API is handled by the Hackerbot platform. You can send drive commands, and control various other states of the robot, with more in the works.
The design also makes it easy to expand — it includes a full "top deck" area for mounting your own hardware, sensors, or payloads. If you’ve built your share of janky robots (I have), you know how much time and motivation it saves to not start from zero every time.
Why would I buy a robot vacuum I don’t plan to vacuum with?
Because it handles the annoying-but-important parts of robot design: battery management, docking, obstacle sensing, smooth driving. It’s built for people who want a solid foundation for autonomous robotics work — whether that's computer vision, SLAM, object tracking, or something else entirely.
What’s my plan?
Right now I’m focusing on mapping and navigation. I’ve heard of some interesting ideas around computer-vision-based localization — ways to estimate a robot’s position just from visual landmarks. The Hackerbot gives me the right kind of playground to explore that without getting bogged down in hardware.
One of the first things I need to teach it is to stop picking fights with the bath mats!
